Sandbox: the Summit-XL HL
In this short sandbox you will experiment with the Summit-XL, the robot you will use during the practical lessons of the mobile robotics part of the course. To do so, you will test the functionalities, sensors and actuators of the robot by commanding the robot using the Linux terminal. A comprehensive list of sensors, actuators and functionalities of the robot is provided in the section the Summit-XL.
Objective
The objective of this practical lesson is to explore the functionalities of the Summit-XL and familiarize with its set of sensors and actuators.
Running the sandbox
In this exercise, you will be guided step by step to experiment with the Summit-XL using command lines. Your task is to search in the section the Sumit-XL for the appropriate commands that will allow you to perform different specific tasks with the robot.
Launching the experiment
1 - Open a terminal and enter the directory that contains the materials for this practical session.
cd ~/catkin_ws/src/sandbox_summit_xl/launch
2 - After, run the simulation with the command.
roslaunch sandbox_summit_xl sandbox.launch
3 - Once you are done with the exercises, stop the simulation by clicking in the terminal and pressing the keys Ctrl + C until all processes stop.
Experimental setup
At the beginning of the experiment, a Summit-XL is placed at the center of a foot-ball field.
[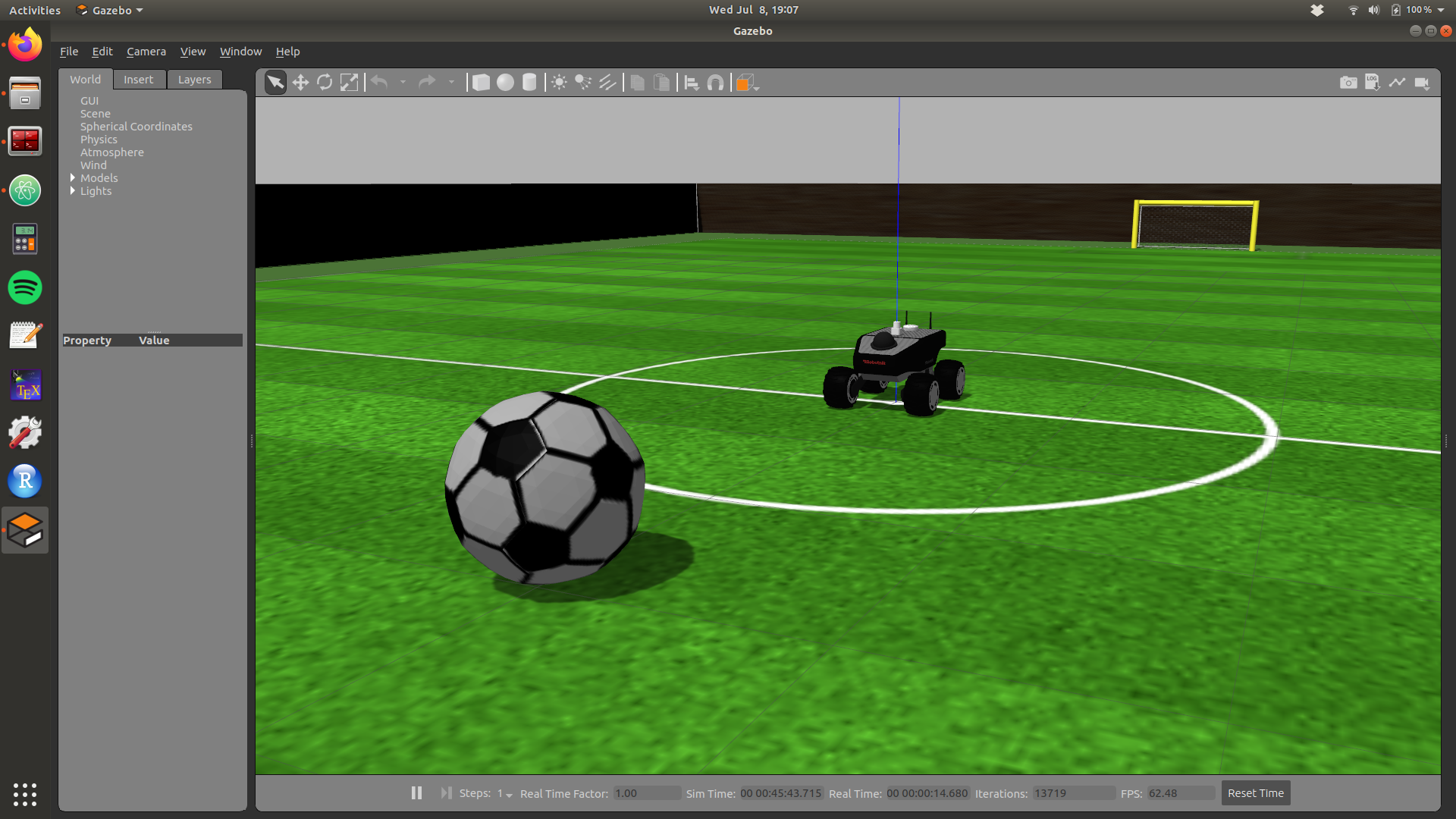 ]
]
Robot tasks
You find below a series of behaviors that the Summit-XL must display. Your task is sent the right command lines to achieve them.
1 - Move the robot forward with constant velocity.
2 - Rotate the robot in place.
3 - Move the robot forward and following an arch trajectory to the right.
4 - Move the robot backwards and following an arch trajectory to the left.
5 - Move the robot in circles, and visualize the stream of images given by the camera.
6 - Move the robot forward while changing the pan of the camera at 45° and -45°.
7 - Center the pan of the camera and rise the tilt by 0.3 rad, and afterwards, push the football into both goals of the field.
After successfully executing the aforementioned behaviors with the robot, you are now able to start your experiments in mobile robotics in the practical session P1.1.
Further information
The following videos show experiments in which the Summit-XL is used to conduct research in precision agriculture, and search and rescue missions.